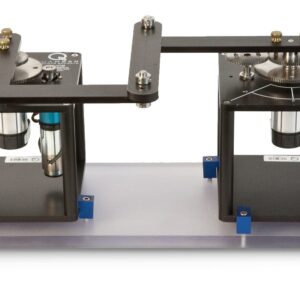
Un moyen rentable d’introduire la robotique et l’haptique
L’Omni ™ Bundle est un moyen rentable et sûr d’introduire des concepts et théories de contrôle intermédiaires et avancés liés à la robotique et à l’haptique. La combinaison de l’appareil haptique Geomagic Touch ™ (anciennement SensAble Phantom Omni) avec le logiciel de contrôle QUARC® et un programme complet développé par Quanser permet aux étudiants de traduire facilement la théorie du cours en une expérience pratique.
Expériences et cours:
- Cinématique avant et paramètres D-H
- Cinématique inverse
- Contrôle PD et PID de niveau commun
- Planification de la trajectoire (espace commun vs espace de tâches)
- Dérivation jacobienne et application
- Différents rendus haptiques «loi de force» (champs de force, contacts durs et mous, etc.)
- Développement graphique à l’aide de Quanser 3D Viewer
Spécification Technique:
| Force feedback workspace (W x H x D) | 160 mm x 120 mm x 70 mm |
| Footprint (physical area device occupies on desk) | 168 mm x 203 mm |
| Device mass | 1.8 kg |
| Range of motion | hand movement pivoting at wrist |
| Nominal position resolution | > 450 dpi / 0.055 mm |
| Maximum exertable force at nominal position | 3.3 N |
| Continuous exertable force (24 hrs.) | 0.88 N |
| Stiffness | 1.26 N/mm (X axis) / 2.31 N/mm (Y axis) / 1.02 N/mm (Z axis) |
| Inertia (apparent mass at tip) | 45 g |
| Force feedback | x, y, z |
| Interface | USB |