Aperçu:
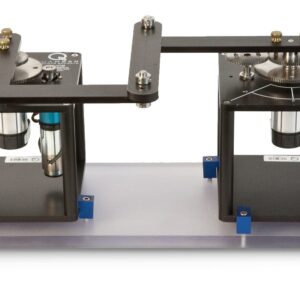
En tant que dispositif haptique habile, HD² permet aux chercheurs d’interagir avec des environnements virtuels ou distants à l’aide d’un retour de force programmable. Comparé à d’autres appareils haptiques disponibles dans le commerce, le HD² a un grand espace de travail et une dynamique intermédiaire très faible. Ce mécanisme parallèle est hautement entraînable par l’arrière avec un frottement négligeable. L’entraînement de cabestan robuste et les moteurs haute performance réduisent l’inertie perçue tout en maintenant la rigidité de la structure de l’appareil.
Spécification Techniques:
| Workspace | 800 mm (X), 250 mm (Y), 350 mm (Z) 180 degrees (roll), 180 degrees (pitch), continuous (yaw) |
| Tip inertia | 300 g (X), 300 g (Y), 300 g (Z) 2.29 g.m ²(roll), 2.29 g.m² (pitch), 0.79 g.m² (yaw) |
| Back drive frictions | 0.353 N (X), 0.353 N (Y), 0.353 N (Z) 61.775 N/mm (roll), 61.775 N/mm (pitch), 0.5 N/mm (yaw) |
| Maximum force/torque at 2 amps | 19.71 N (X), 19.71 N (Y), 13.94 N (Z) 1.72 N.m (roll), 1.72 N,m (pitch), 1.72 N.m (yaw) |
| Continuous force/torque at 1.1 amps | 10.84 N (X), 10.84 N (Y), 7.67 N (Z) 0.948 N.m (roll), 0.948 N.m (pitch), 0.948 N.m (yaw) |
| Position resolution | 0.051 mm (X), 0.051 mm (Y), 0.051 mm (Z) 0.033 degrees (roll), 0.033 degrees (pitch), 0.088 degrees (yaw) |
| Stiffness at 10 kHz | 3000 N/m (X), 3000 N/m (Y), 3000 N/m (Z) 3.4 N.m/rad (roll), 3.4 N.m/rad (pitch), 0.05 N.m/rad (yaw) (torque at 0.6 A) |
| Dimensions (H x W x L) | 0.53 m x 0.3 m x 0.5 m |
| Mass, including the amplifiers | 22 kg |