Caractéristiques :
Programme d’études et exercices et TP de robotique et de mécatronique
applications via Simulink, Python et/ou ROS
Prise en charge de capteurs et d’actionneurs disponibles sur le marché grâce à une interface d’entrée/sortie à 40 broches et à des Pi HATs
Conception d’une architecture ouverte avec des documents complets sur les modèles et les paramètres du système.
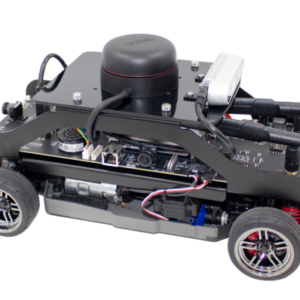
Plate-forme de prototypage électromécanique et aire d’atterrissage pour les drones
Intégration facile d’éléments supplémentaires du studio de recherche sur les véhicules autonomes Quanser
Large gamme de capteurs incluant des pare-chocs, des capteurs de chute de roue et de falaise, un gyroscope à 3 axes, une caméra Intel RealSense D415 RGBD.
Cours et Exercices:
Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, permettant aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de construire un nouveau cours.
- Cinématique d’entraînement différentiel
- Cinématique directe et inverse
- Estimation de localisation
- Planification de trajectoire et évitement d’obstacles
- Cartographie 2D et carte de grille d’occupation
- Acquisition, traitement et raisonnement d’images
- Localisation et cartographie
- Architecture de contrôle de haut niveau des robots mobiles
- Commande de véhicule guidée par la vision
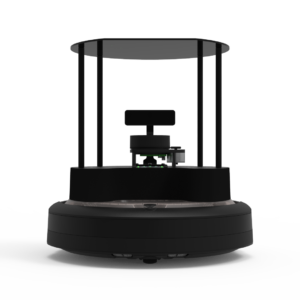
Platform |
2-wheeled Kobuki base from Yujin Robot |
QBot 3 diameter |
35 cm |
QBot 3 height |
16 cm |
Maximum linear speed |
0.7 m/s |
Available payload |
app. 4.5 kg |
Battery life |
Maximum 3 hours |
On-board computer |
Raspberry Pi 4B 4GB |
Camera resolution |
1080p @ 30Hz, 720p @ 30Hz, 480p @ 60Hz |
Depth resolution |
720p @ 30Hz, 480p @ 60Hz |
Depth range |
0.5 to 12 m |
LCD module |
32 characters (16 per line) |
On-board sensors |
3 digital bump sensors2 digital wheel drop sensors3 cliff sensors1 3-axis gyrosc0pe2 analog motor current sensors1 Z-axis angle measurement (heading)2 multicolor programmable LEDs
|
Additional I/O channels |
28 reconfigurable digital I/O channels, including2 SPI bus channels1 I2C serial bus channel2 PWM output channels1 UART serial port (interface 3.3 V serial device) |
Additional Connectivity |
2 USB 3.0 user ports4 USB 2.0 user ports1 MIPI DSI display port for touch screen1 gigabit Ethernet port1 MIPI CSI camera port40-pin I/O header |