-

HUSKY Robot Terrestre Sans Pilote
La base mobile robotique Husky a été conçue pour être performante même dans dans des conditions difficiles. Équipé d’un châssis quatre roues motrices puissant et sans-entretien, de pneus robustes tout-terrain, d’une garde au sol parmi les plus avantageuses sur le marché, le robot mobile Husky va amener votre exploration robotique vers de nouveaux horizons.
-

JACKAL Robot Terrestre Sans Pilote
Le Jackal est un robot autonome d’extérieur créé par ClearPath Robotics . Le robot terrestre Jackal est un système complet, compact et étanche. Le Jackal est une plateforme flexible sur laquelle il est simple de connecter des capteurs et caméras. Avec sa charge utile élevée, un généreux éventail de possibilités d’alimentation et son API ROS , la base mobile d’extérieur Jackal est en ce moment la meilleure solution sur le marché pour construire un robot autonome d’extérieur.
-
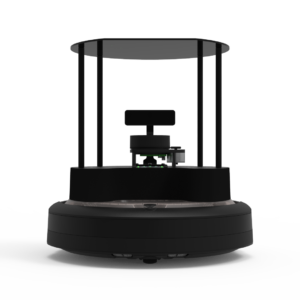
Plateforme D’apprentissage De La Robotique TURTLEBOT 4
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l’éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable.
-

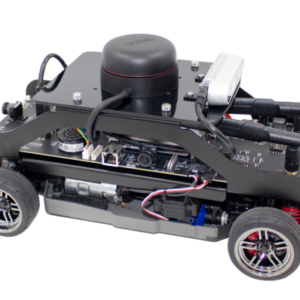
Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-
Véhicule autonome riche en capteurs
Caractéristique Technique:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Fiche Technique Click ici
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Automobile
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible