-

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

Drone Haute Performance pour Laboratoires de Recherche
Aperçu:
Le cadre en fibre de carbone léger et durable rend le QDrone 2 très maniable et capable de résister à des applications à fort impact, avec peu de temps nécessaire pour les réparations entre les vols. Le puissant processeur embarqué et les multiples caméras haute résolution accélérées permettent un traitement vidéo inédit à bord, ainsi qu’une diffusion en continu pour une surveillance en temps réel. -
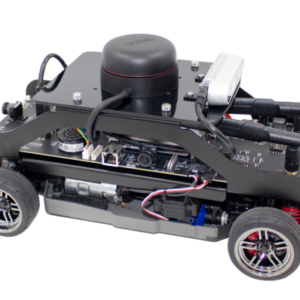
Véhicule autonome riche en capteurs
Caractéristique Technique:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Fiche Technique Click ici
-

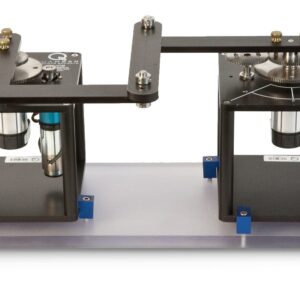
Dispositif haptique haute définition HD²
Caractéristique Techniques:
- Articulations à grande rotation arrière et dynamique intermédiaire très faible
- Structure très rigide à faible friction et inertie
- Mécanisme d’entraînement du cabestan
- Contrepoids conçus pour éliminer les effets de la gravité
- Entrées auxiliaires analogiques et numériques
- Position de la poignée reconfigurable
- Codeurs optiques haute résolution
- Amplificateurs de courant linéaires intégrés
- Connectivité facile à la carte de contrôle d’acquisition de données via un câble SCSI
- Pédale à pied pour entrée numérique auxiliaire
-
2 DOF Robot: Banc d’essai pour l’enseignement des principes fondamentaux de la robotique
Caractéristiques :
– Système de liaison en aluminium à 4 barres de précision
– Possibilité de monter le module du pendule inversé à 2 DOF pour des expériences supplémentaires (vendu séparément)
– Le module robotique 2 DOF se fixe facilement à l’unité de base des servo-moteurs rotatifs
– Câbles et connecteurs faciles à brancher
– Entièrement compatible avec MATLAB®/Simulink® et LabVIEW™
– Modèles de systèmes et paramètres entièrement documentés fournis pour MATLAB®, Simulink®, LabVIEW™ et Maple™
– Conception d’architecture ouverte, permettant aux utilisateurs de concevoir leur propre contrôleur -

EMONA TIMS-301C Système de Modélisation en Télécommunications
Quelle est la particularité de TIMS-301 ?
– L’ensemble de MODULE AVANCÉ ajoute plus de 50 fonctions supplémentaires pour mettre en œuvre la vaste gamme de capacités d’expérimentation du TIMS.
– Des modules basés sur le DSP sont disponibles pour comparer les performances des circuits électroniques traditionnels avec les techniques de traitement numérique du signal (DSP) dans l’environnement TIMS, ainsi que pour mettre en œuvre des schémas plus complexes.
– Les modules internes peuvent être conçus pour s’intégrer dans le système TIMS grâce à l’architecture ouverte de TIMS.
– Le TIMS-301C comprend un instrument virtuel intégré qui peut être connecté à un PC pour donner des fonctions d’oscilloscope et d’analyse de spectre (FFT).
– Les « TIMS Trunks » sont uniques au TIMS et permettent de mettre en réseau un laboratoire TIMS. L’instructeur peut envoyer jusqu’à 3 signaux de télécommunications du système TIMS maître, vers le système TIMS de chaque élève.
– Le TIMS est entièrement autonome. Le seul équipement supplémentaire nécessaire est un oscilloscope.
– Il est rapide et facile à utiliser. Le panneau avant de chaque module est disposé de manière fonctionnelle, avec les entrées à gauche et les sorties à droite du panneau. Toutes les entrées et les sorties sont codées par couleur pour indiquer le type de signal : jaune pour les signaux analogiques et rouge pour les signaux numériques. Des prises de 4 mm de haute qualité sont utilisées partout. -

BiSKIT 101: Formateur en Télécommunications
Quels sujets pouvons-nous enseigner avec l’ETT-101 ?
- Communications analogiques de base :
AM, FM, DSB, SSB, PAM, TDM, PWM, Superhétérodyne, Speech in comms, PLL, QAM, SNR CONCEPTS
- Communications numériques :
PCM, PCM-TDM, ASK, BPSK, FSK, GFSK, Eye Patterns, DPSK, QPSK, Spread Spectrum, Line Coding, Delta Modulation, Noise Generation, SNR Concepts, et plus
Toutes les expériences sont entièrement documentées, avec des sections de questions et réponses entièrement intégrées dans le texte. Vous disposez maintenant d’une solution clé en main pour l’enseignement de votre programme de communication, avec une capacité d’expansion dans le futur.
-

ITS-101A : Système Didactique de Protocole Internet TCP/IP
Liste des Expérimentations :
1. Envoi et suivi de trames Ethernet
2. Découverte de l’adresse MAC
3. Protocole de résolution d’adresse (ARP)
4. ICMP Ping et Checksum
5. Acheminement IP direct et routage IP via la passerelle par défaut
6. Routage W par sauts successifs (Next-Hop)
7. TTL dans routage IP
8. Trace de routage IP
9. Path MTU discovery (PMTUd)
10. Perturbation de réseau IP
11. Contrôle des erreurs
12. Méthode de la fenêtre glissante
13. Evitement d’encombrement
14. Implémentation complète du protocole TCP
15. Comparaison entre TCP et UDP
16. Système de noms de domaine (DNS)
17. Echo
18. Client SMTP
19. Protocole d’application HTTP
20. Protocole d’application Telnet
21. Protocole d’application FTP
22. Protocole d’application NAT
23. Le Pare-feu
24. La passerelle applicative (Proxy) ARP
25. Dénomination IP (Aliasing) -

ITS-200 series : Système didactique IPv6
La croissance explosive de la diversité de périphériques réseau et de la communication mobile, ainsi que l’adoption mondiale de technologies de réseaux, ont submergé IPv4 et ont accéléré le développement d’une nouvelle génération du protocole Internet (IPv6). En plus de fournir plus d’adresses IP, IPv6 augmente non seulement l’efficacité du routage et la sécurité de la couche réseau (mécanisme de cryptage IPSec intégré), mais crée également de nouveaux moyens d’adressage et de mécanismes de QoS plus avancés. L’objectif de la série ITS-200 est de fournir aux apprenants une compréhension claire et complète du protocole et du comportement de fonctionnement de la spécification IPv6. Le système complet comprend ITS-201 (hôte: client), ITS-202 (hôte: serveur) et ITS-203 (routeur). L’interaction de ces trois appareils peut effectuer une expérience en groupe ou en autonome.
-

DGS-200 Dispositif Expérimental GSM / GPS
Liste des Expérimentations :
Expérience 1-1 : Réglage du taux de baud du module GPS
Expérience 1-2 : Commande de la mise-à-jour du taux de baud du module GPS
Expérience 2-1 : Le DGS-200 compose un numéro de téléphone mobile avec la commande AT
Expérience 2-2 : Le DGS-200 répond à un appel de téléphone mobile avec la commande AT
Expérience 2-3 : Le DGS-200 envoie un message SMS à un téléphone mobile avec la commande AT
Expérience 2-4 : Le DGS-200 reçoit un message SMS d’un téléphone mobile avec la commande AT
Expérience 2-5 : Le DGS-200 vérifie la qualité du signal avec la commande AT
Expérience 2-6 : Le DGS-200 se connecte à Internet
Expérience 3 : Expérience sur le microcontrôleur
Expérience 4 : Expérience sur les applications du DGS-200 -

DCN-100 Système Didactique IP-PBX
Liste des Expérimentations :
• Réglage de l’unité principale IP-PBX
• Installation et application d’un téléphone IP
• Instruction du fonctionnement de la passerelle VoIP – logiciel et matériel
• Paramètres de passerelle et applications: Téléphone analogique (FXS)
• Paramètres de passerelle et applications (1): Foreign Exchange Office(PSTN)
• Paramètres de passerelle et applications (2): Foreign Exchange Office (PSTN)
• Paramètres du standard d’échange automatique
• Paramètres de la passerelle et intégration de l’Auto-Attendant
• Configuration du visiophone
• DTMF
• Messagerie vocale
• Téléphones de groupe
• Appel décroché
• Système de radiodiffusion
• Salle de conférence vocale
• Configuration et numérotation des téléphones IP-PBX dans l’ordinateur
• PoE (alimentation électrique par câble Ethernet) -

EM-3350 Modèles a vue en coupe des machines electriques
Description
Les modèles en coupe sont fabriqués à partir de machines électriques normales. Le stator est découpé de 1/4 sur toute la longueur pour une vue optimale de la construction interne de la machine et il est toujours en fonctionnement. Les surfaces en coupe sont protégées contre la corrosion.Contenu :
Moteur CC à aimant permanent
Moteur à induction monophasé
Moteur shunt à courant continu
Moteur CC à excitation composée (compound)
Moteur synchrone triphasé à pôles saillants
Moteur à induction triphasé à rotor bobiné
Moteur à induction triphasé à cage d’écureuil
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Automobile
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible