-

Régulation de débit
– Contrôle et mesure de débit
– Logiciel de contrôle PID PC type SCADA avec contrôle et surveillance des données
– Unité autonome complète
– Connexion au PC via USB
– Eau utilisée pour le processus
– Capteur de débit de turbine
– Débitmètre pour la surveillance visuelle
– Réservoir et tuyaux transparents -

Banc de Contrôle de processus
Principales caractéristiques
– Contrôle et mesure de la température, du niveau, de la pression et du débit
– Logiciel de contrôle PID PC SCADA avec contrôle et acquisition de données
– Les compteurs LCD et LED fournissent des informations instantanées
– Imitation du gréement sur la console de commande
– Points de test et de mesure pour les transducteurs et les interrupteurs d’insertion de défaut
– Connexion au PC via une clé USB
– La console de contrôle peut être connectée à un PC ou à un API
– Réservoir et tuyaux transparents -

Modular Servo
Le servomoteur modulaire est spécialement conçu pour l’étude et la vérification pratique des méthodes de contrôle de base et avancées. Cela comprend la démonstration de facteurs variables typiques tels que le frottement, l’amortissement et l’inertie ainsi qu’un certain nombre de méthodes de contrôle de position / vitesse allant du PID au LQ et un contrôle optimal dans le temps.
Le MODULE MOTEUR CC peut être couplé à plusieurs autres modules. Un certain nombre de modules mécaniques linéaires et non linéaires sont conçus pour démontrer l’influence du jeu, de l’amortissement, de l’élasticité et du frottement. Les unités peuvent être étudiées individuellement avant de terminer le système. LE MODULE D’AMORTISSEMENT se compose d’un disque paramagnétique qui court entre les pôles d’un aimant permanent. INERTIA MODULE est équipé d’un rouleau métallique solide. Une baserail en acier fournit une fixation ferme aux modules, permettant d’imiter des schémas de principe, mais toutes les connexions électriques sont effectuées à l’intérieur du logiciel. Aucune compétence mécanique n’est requise pour assembler un système de travail. Modular Servo fonctionne avec un contrôleur numérique basé sur PC. Le PC communique avec le capteur de position et le moteur par la carte d’E / S et l’interface d’alimentation. La carte d’E / S est contrôlée par le logiciel en temps réel qui fonctionne dans l’environnement MATLAB / Simulink RTW / RTWT. La bibliothèque préprogrammée de contrôleurs et de modèles Simulink prend en charge le servomoteur modulaire. Une gamme complète d’expériences peut être réalisée en utilisant Modular Servo et les logiciels associés.
-

Système multitank
Vérification pratique des méthodes avancées de contrôle linéaire et non linéaire
-
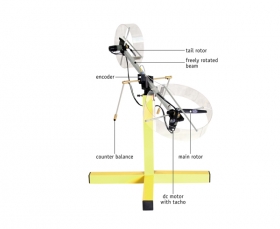
Système aérodynamique à deux rotors
Le système de commande à entrées multiples et sorties multiples (MIMO) fortement couplé en croix
Le système aérodynamique à deux rotors (TRAS) est une configuration de laboratoire conçue pour les expériences de contrôle. À certains égards, son comportement ressemble à celui d’un hélicoptère. Du point de vue du contrôle, il illustre un système non linéaire d’ordre élevé avec des couplages croisés importants.
-

Quanser AERO
- Système compact et intégré
- Moteurs CC sans noyau à haute efficacité
- Encodeur optique haute résolution
- Axes de tangage et de lacet et mesures de vitesse des moteurs / rotors CC via un tachymètre numérique
- Amplificateur de tension intégré avec capteur de courant intégré
- Dispositif intégré d’acquisition de données MAO)
- Interface informatique OFLEX 2 flexible pour les connexions USB et SPI
- LED tricolore contrôlable par l’utilisateur
- Câbles et connecteurs faciles à connecter
- Conception d’architecture ouverte. permettant aux utilisateurs de concevoir leur propre contrôleur
- Entièrement compatible avec MATLAB, * / Simulink * et LabVIEW ‘ »
- Modèles de système et paramètres entièrement documentés fournis pour MATLAB.,? ./ Simulink *. LabVIEW—)
- Aligné ABET. modulaire. didacticiel sur les médias numériques fourni pour la clé USB Ouanser AERO
- Exemples de microcontrôleurs et fiche technique d’interface fournis pour l’Ouanser AERO Embedded
-

QUBE – Servo 2 Une solution de servomoteur intégrée pour les laboratoires de contrôles
Le Quanser QUBE ™ -Servo 2 est une expérience de laboratoire de servomoteurs modulaire entièrement intégrée conçue pour l’enseignement de la mécatronique et des concepts de contrôle au niveau du premier cycle.
-

ACS-1000 Système de commande analogique
- L’automatique est une discipline intéressante. Elle est la meilleure voie et la plus rapide pour apprendre la commande des systèmes afin d’améliorer les processus de production. La commande électronique analogique et sa simulation sont devenues la base fondamentale du développement technologique. K&H met à la disposition des étudiants ACS-1000 afin d’observer par la pratique, le résultat des contrôleurs PID (proportionnel, intégrateur et dérivateur) aussi bien que le retard et l’avance de phase des contrôleurs.
- ACS-1000 est constitué de plusieurs modules enfichables lui acquerrant assez de flexibilité d’utilisation pour répondre aux besoins des utilisateurs de tous les niveaux pour le montage d’expériences adéquates.
- L’ensemble des modules permet aux étudiants de comprendre la théorie de commande et les applications pratiques de la commande de moteur à travers nos curriculums d’enseignement.
- Nous fournissons également un module de dispositif d’acquisition de données comme interface pour faciliter la sauvegarde de données par ordinateur (en option)
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Automobile
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

