-
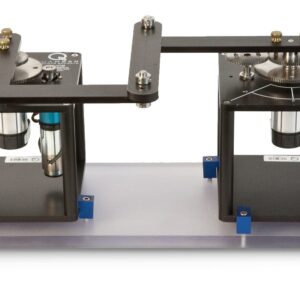
2 DOF Robot: Banc d’essai pour l’enseignement des principes fondamentaux de la robotique
Caractéristiques :
– Système de liaison en aluminium à 4 barres de précision
– Possibilité de monter le module du pendule inversé à 2 DOF pour des expériences supplémentaires (vendu séparément)
– Le module robotique 2 DOF se fixe facilement à l’unité de base des servo-moteurs rotatifs
– Câbles et connecteurs faciles à brancher
– Entièrement compatible avec MATLAB®/Simulink® et LabVIEW™
– Modèles de systèmes et paramètres entièrement documentés fournis pour MATLAB®, Simulink®, LabVIEW™ et Maple™
– Conception d’architecture ouverte, permettant aux utilisateurs de concevoir leur propre contrôleur -

Analyse thermique simultanée à haute température (STA – ATG/DSC)
- MODÈLE STA PT 1600
-Plage de température: RT jusqu’à 1600°C
-Vitesse de chauffage: 0,1 à 50°C/min (dépend du four)
-Masse de l’échantillon: 5/ 25 / 35 g
-Résolution: 0,1 / 0,5 ug
-Vide: 10-5mbar
-Pression: en option 5 bar
-Capteurs:
TG
TG – DTA
TG – DSC
-Matériau de la sonde: E/K/S/B/C (C = DTA only)
-Interface: USB
- MODÈLE STA PT 1600
-
Calorimètre à balayage différentiel DSC Modèle PT 1600
MODÈLE DSC PT 1600
Plage de température: -150°C … 700°C, RT – 1400/1500/1600/1650/1750 °C
Capteurs: E/K/S/B
Types de Capteurs: DTA / DSC / DSC – Cp
Vitesse de chauffe: 0.001 K/min … 50 K/min
Vitesse de refroidissement*: 0.001 K/min … 50 K/min
Capteur: Flux de chaleur
Modulation de la température: disponible
Temperaturmodulation: ja
Atmosphères: réductrice, oxid., inert (statique, dynamique)
Vide: 10-5mbar
PC Interface: USB -

Dispositif haptique haute définition HD²
Caractéristique Techniques:
- Articulations à grande rotation arrière et dynamique intermédiaire très faible
- Structure très rigide à faible friction et inertie
- Mécanisme d’entraînement du cabestan
- Contrepoids conçus pour éliminer les effets de la gravité
- Entrées auxiliaires analogiques et numériques
- Position de la poignée reconfigurable
- Codeurs optiques haute résolution
- Amplificateurs de courant linéaires intégrés
- Connectivité facile à la carte de contrôle d’acquisition de données via un câble SCSI
- Pédale à pied pour entrée numérique auxiliaire
-

Drone Haute Performance pour Laboratoires de Recherche
Aperçu:
Le cadre en fibre de carbone léger et durable rend le QDrone 2 très maniable et capable de résister à des applications à fort impact, avec peu de temps nécessaire pour les réparations entre les vols. Le puissant processeur embarqué et les multiples caméras haute résolution accélérées permettent un traitement vidéo inédit à bord, ainsi qu’une diffusion en continu pour une surveillance en temps réel. -

Leaper-56 Programmateur CI Universel de Poche
Caractéristiques techniques :Type d’accessoire : Programmateur mémoire
Interface : Serial-SPI, USB 2.0
Nom du programmeur : Leaper-56
Type de mémoire programmé : EEPROM, EPROM, FLASH, NVRAM -

QUBE – Servo 2 Une solution de servomoteur intégrée pour les laboratoires de contrôles
Le Quanser QUBE ™ -Servo 2 est une expérience de laboratoire de servomoteurs modulaire entièrement intégrée conçue pour l’enseignement de la mécatronique et des concepts de contrôle au niveau du premier cycle.
-

Réservoirs couplés
FONCTIONNALITÉS
• Cadre global en plexiglas massif
• Conception à deux réservoirs et pompe unique
• Capteurs de pression / niveau sur chaque réservoir
• Pompe de débit d’eau et réservoirs reconfigurables
• Le robinet de vidange permet à l’eau du réservoir supérieur de se verser directement dans le bassin
• Trois tailles d’orifices de sortie fournis (petit, moyen et grand)
• Les capteurs de pression peuvent être étalonnés (à l’aide des boutons de gain et de décalage)
• Entièrement compatible avec MATLAB® / Simulink® et LabVIEW ™
• Câble et connecteurs faciles à connecter
• Modèle de système entièrement documenté et paramètres fournis pour MATLAB® / Simulink®, LabVIEW ™ et Maple ™
• Conception d’architecture ouverte, permet aux utilisateurs de concevoir leur propre contrôleur -

Robot Mobile Hautes Performances
Le Quanser QBot 3 est un robot terrestre autonome innovant à architecture ouverte, construit sur une plate-forme mobile à deux roues. Équipé de capteurs intégrés, d’un système de vision et accompagné d’un didacticiel complet, le QBot 3 convient parfaitement à l’enseignement des cours de robotique et de mécatronique de premier cycle et de niveau avancé. Les exercices de laboratoire du didacticiel sont organisés en un ensemble de modules indépendants, ce qui permet aux professeurs de les sélectionner et de les adapter facilement à un cours existant, ou de créer un nouveau cours.
-

SU-320 Programmateur Universel
Caractéristiques :
– Fournit une bande passante DUT de 75MHz et une distorsion du signal < ±2,5nS.
– Fournit un fonctionnement en mode autonome. Avec 5 touches et un écran LCD 20×4, vous pouvez sélectionner un projet et commencer à programmer facilement sans PC.
– Conception portable et compacte, minimisant l’espace de travail et maximisant l’efficacité.
– Permet de tester l’insertion du circuit intégré et de vérifier les contacts avant la programmation universelle. En mode AUTO, il suffit d’insérer le CI, et le SU-320 démarre tous les processus automatiquement.
– Offre une grande souplesse d’extension grâce à sa conception modulaire. Il peut être utilisé comme programmateur universel à site unique ou comme programmateur universel de groupe.
– Fournit un logiciel orienté vers la production de masse avec des informations complètes sur les journaux pour une meilleure traçabilité.
- ACCUEIL
- PRODUIT
- Division des Sciences de l’ingénieur
- Instruments de Tests et Mesures
- Alimentation de laboratoire
- Oscilloscope
- Multimètre
- Générateur de Fonction Arbitraire / Analogique
- Générateur de Signaux
- Analyseurs de spectre
- Analyseur de réseau vectoriel
- LCR Mètre
- Fréquence mètre
- Impédance mètre
- Analyseur de réseau Électrique
- Charge Electronique
- Matériel didactique portable
- Equipements de laboratoire
- Génie électrique
- Génie Mécanique
- Génie civil
- Génie Procédé
- Aéronautique et Aviation
- Instruments de Tests et Mesures
- Division Sciences Physiques et Sciences Naturelles
- Division Recherche et industrie
- Division des Sciences de l’ingénieur
- Entreprise
- Contact
- Disponible

