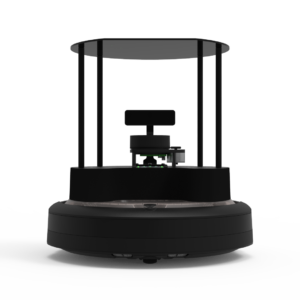
Aperçu:
Le QCar est alimenté par le supercalculateur NVIDIA® Jetson ™ TX2 et équipé d’une large gamme de capteurs, y compris le LIDAR, la vision à 360 degrés, le capteur de profondeur, l’IMU, les encodeurs, ainsi que les E / S extensibles par l’utilisateur. Utilisez-le pour démarrer votre recherche et faire évoluer votre parc de véhicules existant, tout en tirant parti de plusieurs environnements logiciels, notamment Simulink®, Python ™, C / C ++, TensorFlow et ROS.
Spécification Technique:
| Dimensions | 39 x 21 x 21 cm |
| Weight (with batteries) | 2.7 kg |
| Power | 3S 11.1 V LiPo (3300 mAh) with XT60 connector |
| Operation time (approximate) | 2 hr 11 m (stationary, with sensors feedback) |
| 35 m (driving, with sensor feedback) | |
| Onboard computer | NVIDIA® Jetson™ TX2 |
| CPU: 2 GHz quad-core ARM Cortex-A57 64-bit + 2 GHz Dual-Core NVIDIA Denver2 64-bit | |
| GPU: 256-core NVIDIA Pascal™ GPU architecture , 1.3 TFLOPS (FP16) | |
| Memory: 8GB 128-bit LPDDR4 @ 1866 MHz, 59.7 GB/s | |
| LIDAR | LIDAR with 2k-8k resolution, 10-15Hz scan rate, 12m range |
| Cameras | Intel D435 RGBD Camera |
| 360° 2D CSI Cameras using 4x 160° FOV wide angle lenses, 21fps to 120fps | |
| Encoders | 720 count motor encoder pre-gearing with hardware digital tachometer |
| IMU | 9 axis IMU sensor (gyro, accelerometer, magnetometer) |
| Safety features | Hardware “safe” shutdown button |
| Auto-power off to protect batteries | |
| Expandable IO | 2x SPI |
| 4x I2C | |
| 40x GPIO (digital) | |
| 4x USB 3.0 ports | |
| 1x USB 2.0 OTG port | |
| 3x Serial | |
| 4x Additional encoders with hardware digital tachometer | |
| 4x Unipolar analog input, 12 bit, 3.3V | |
| 2x CAN Bus | |
| 8x PWM (shared with GPIO) | |
| Connectivity | WiFi 802.11a/b/g/n/ac 867Mbps with dual antennas |
| 2x HDMI ports for dual monitor support | |
| 1x 10/100/1000 BASE-T Ethernet | |
| Additional QCar feautres | Headlights, brake lights, turn signals, and reverse lights (with intensity control) |
| Dual microphones | |
| Speaker | |
| LCD diagnostic monitoring, battery voltage, and custom text support |