")

")
")
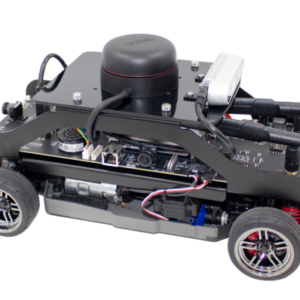
Le robot mobile ROS Jackal intègre un GPS, une centrale à inertie et un ordinateur embarqués.
Plate-forme robotisée 100 % open-source, le robot mobile GPS Jackal vous permet également d’accéder à un environnement de programmation complet et ouvert sur toute une communauté d’utilisateurs, comprenant exemples et librairies de codes en fonction des capteurs que vous souhaiterez ajouter à votre plate-forme. Vous pourrez également développer facilement vos propres applications à partager à votre tour !
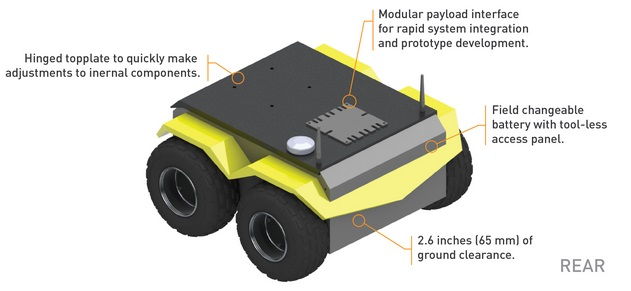
Ce robot d’exploration programmable est conçu pour faciliter la tâche de tous ses utilisateurs : capteurs, caméras et autres accessoires sont très faciles à ajouter, et si vous avez besoin de faire de nouveaux branchements ou d’opérer des modifications sur l’ordinateur de bord, il suffit d’ouvrir le capot du véhicule pour avoir accès à tous les circuits internes !
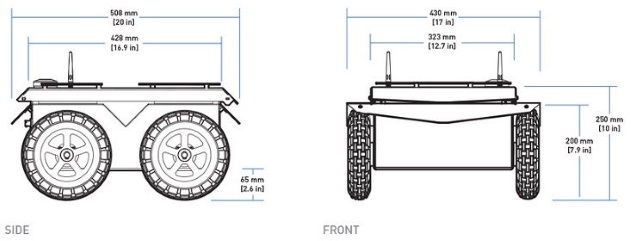
Dimensions et poids :
- Dimensions externes (L x l x h) : 508 x 430 x 250 mm
- Dimensions de l’espace de stockage interne : 250 x 100 x 85 mm
- Poids : 17 kg
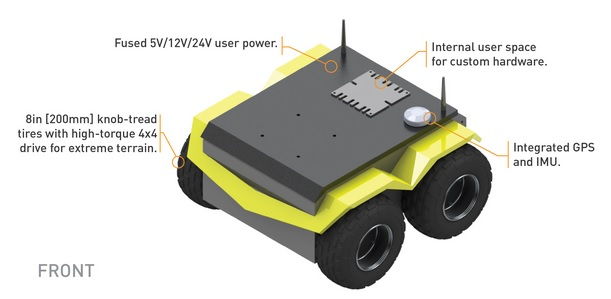
- Garde au sol : 65 mm
Vitesse et performance :
- Charge utile max. : 20 kg
- Charge utile tout-terrain : 10 kg
- Vitesse max. : 2.0 m/s
- Puissance motrice : 500 W
Batterie et systèmes d’alimentation :
- Chimie de la batterie : Lithium-Ion
- Capacité : 270 Wh
- Temps de chargement : 4 h
- Autonomie:
- charges extrêmes : 2 h
- usage standard : 8 h
- Tensions de fonctionnement (au choix) :
- 5 V @ 5 A
- 12 V @ 10 A
- 24 V @ 20 A
Interface et communication :
- Modes de contrôle :
- Circuit ouvert
- Vitesse angulaire
- Vitesse cinématique
- Feedback :
- Batterie et moteur
- Courant
- Vitesse angulaire
- Débattement de roue
- Récepteur GPS intégré
- Gyroscope intégré
- Accéléromètre intégré
- Encodeurs à quadrature : 78000 impulsions/m
- Communication :
- Standard PC => (2x) Ethernet. (4x) USB 3.0. (1x) RS232, module PCIe, WiFi et Bluetooth 802.11a/b/g/n
- Performance PC => Ethernet. USB 3.0. RS232, (IEEE 1394 available). Wi-Fi 7260 (configurable sur celui-ci du client ou AP mode)
- Drivers et interface de programmation : packagé avec le ROS Indigo et Ubuntu 14.04
- Accessoires intégrés (inclus): Contrôleur de jeu sans fil, GPS, IMU (centrale à inertie), ordinateur embarqué, adaptateur WiFi, plaque support de montage.
Deux versions sont disponibles : la version standard et la version Performance, qui est plus puissante. Les spécifications techniques pour chaque version sont les suivantes :
| Standard version | Performance version | ||
| Intel i3-4330TE | Dual core, 2.4GHz | Intel Core i5 4570TE | Dual core, 2.7GHz |
| 4 GB RAM | 120 GB Hard Drive | 8 GB RAM | 128GB Hard Drive |
| WIFI Adapter | WIFI Adapter | ||