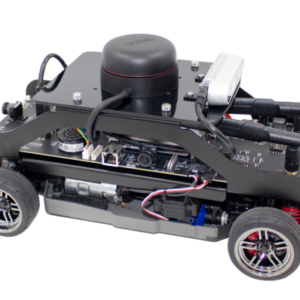
Exemples d’applications du robot terrestre Husky
Systèmes multi-robots
La base mobile Husky a été conçu avec une architecture évolutive ce qui en fait la plateforme idéale pour développer tester et développer des systèmes sur plusieurs robots simultanément.
Perception et navigation
Améliorer l’estimation de l’état de votre robot Husky est possible grâce aux paramètres de contrôle du véhicule adaptables, des mesures d’odométrie de haute précision et du système de diagnostic.
Manipulations
La base mobile Husky peut aisément s’interfacer avec de nombreux manipulateurs et préhenseurs de type industriel pour des tâches de téléopération ou de manipulation.
Télé-opération
La base mobile robotique Husky est livré prête à l’emploi pour toutes les opérations de télé-opération. Branchez votre joystick sans-fil favori et démarrez sans attendre.
Spécifications Techniques du robot terrestre Husky
Poids et dimensions
- Dimensions externes (L x l x h): 990 x 670 x 390 mm
- Dimensions internes: 296 x 411 x 155 mm
- Poids: 50 kg
- Roues: 330 mm (sculptures)
- Garde au sol: 130 mm
Vitesse et performances
- Charge utile maximale: 75 kg
- Charge en mode tout-terrain: 20 kg
- Vitesse maximale: 1.0 m/s
- Transmission/Puissance motrice: 4×4 roues motrices sans entretien
- Niveau maximale en pente: 45° (100% en pente descendante)
- Niveau maximale en traversée: 30° (58% en pente descendante)
Batterie et système d’alimentation
- Catégorie de batterie: Batterie scellée au plomb-acide (SLA)
- Capacité: 24V, 20 Ah
- Durée de fonctionnement de la batterie – en veille: 8 heures
- Durée de fonctionnement de la batterie – en capacité nominale: 3 heures
- Temps de chargement: 4 heures
- Alimentation: 5 V, 12 V, 24 V chacune protégée par des fusibles avec 5A. Puissance totale disponible: 192 W (puissance de 480 W disponible en option).
Communication et interfaces
- Modes de contrôle: Voltage continu, vitesse des roues et vitesse cinématique
- Feedback: Tension des batteries, courant des moteurs, odométrie des roues et système de gestion de sorties.
- Communication: RS232@115200 baud
- Encodeurs: Quadrature: 78,000 impulsions/minute.
- Drivers et API’s: ROS, C++ et Python
Environnemental
- Température de fonctionnement: -10 à 30°C
- Température de stockage: -40 à 50°C
- Indice de protection: IP 44 (Indice de protection IP 55 disponible)